This content refers to the previous stable release of PyMVPA.
Please visit
www.pymvpa.org for the most
recent version of PyMVPA and its documentation.
atlases.fsl
Module: atlases.fsl
Inheritance diagram for mvpa.atlases.fsl:
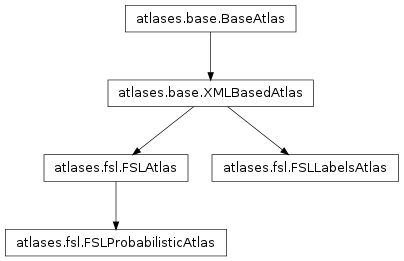
FSL atlases interfaces
Classes
-
class mvpa.atlases.fsl.FSLAtlas(*args, **kwargs)
Bases: mvpa.atlases.base.XMLBasedAtlas
Base class for FSL atlases
See also
Please refer to the documentation of the base class for more information:
XMLBasedAtlas
| Parameters: |
- filename (string) – Filename for the xml definition of the atlas
- resolution (None or float) – Some atlases link to multiple images at different
resolutions. if None – best resolution is selected
using 0th dimension resolution
- image_file (None or str) – If None, overrides filename for the used imagefile, so
it could load a custom (re-registered) atlas maps
- query_voxel (bool) – By default [x,y,z] assumes coordinates in space, but if
query_voxel is True, they are assumed to be voxel coordinates
- coordT – Optional transformation to apply first
- levels (None or slice or list of int) – What levels by default to operate on
|
|---|
-
source = 'FSL'
-
class mvpa.atlases.fsl.FSLProbabilisticAtlas(thr=0.0, strategy='all', sort=True, *args, **kwargs)
Bases: mvpa.atlases.fsl.FSLAtlas
Probabilistic FSL atlases
See also
Please refer to the documentation of the base class for more information:
FSLAtlas
| Parameters: |
- thr (float) – Value to threshold at
- strategy (basestring) – Possible values
all - all entries above thr
max - entry with maximal value
- sort (bool) – Either to sort entries for ‘all’ strategy according to
probability
- filename (string) – Filename for the xml definition of the atlas
- resolution (None or float) – Some atlases link to multiple images at different
resolutions. if None – best resolution is selected
using 0th dimension resolution
- image_file (None or str) – If None, overrides filename for the used imagefile, so
it could load a custom (re-registered) atlas maps
- query_voxel (bool) – By default [x,y,z] assumes coordinates in space, but if
query_voxel is True, they are assumed to be voxel coordinates
- coordT – Optional transformation to apply first
- levels (None or slice or list of int) – What levels by default to operate on
|
|---|
-
find(*args, **kwargs)
Just a shortcut to the only level.
See find for more info
-
getMap(target, strategy='unique')
Return a probability map
| Parameters: |
- target (int or str or re._pattern_type) – If int, map for given index is returned. Otherwise, .find is called
with unique=True to find matching area
- strategy (str in (‘unique’, ‘max’)) – If ‘unique’, then if multiple areas match, exception would be raised.
In case of ‘max’, each voxel would get maximal value of probabilities
from all matching areas
|
|---|
-
getMaps(target)
Return a list of probability maps for the target
| Parameters: | target (str or re._pattern_type) – .find is called with a target and unique=False to find all matches |
|---|
-
labelVoxel(c, levels=None)
Return labels for the voxel